齐次坐标表示
对于一个非齐次表达式(nonhomogeneous expression)表征点
$$ \mathbf{r} = (x, y, z) $$
齐次表达式有,
$$ \tilde{\mathbf{r}} = (x, y, z, 1) \tag{1} $$
其中有
$$ \tilde{\mathbf{r}} \in \mathbb{R}^{3} \times {1} $$
几何变换过程可以用齐次表达式坐标之间的矩阵操作表示,
$$ \tilde{\mathbf{r}}_{\tilde{A}} = \tilde{A}\tilde{\mathbf{r}} \tag{2} $$
其中, $\tilde{\mathbf{r}}_{\tilde{A}} \in \mathbb{R}^{3}\times {1}$ 为在齐次表达式坐标点 $\tilde{\mathbf{r}} \in \mathbb{R}^{3}\times {1}$ 的变换,
$$ \tilde{A} = \left( \begin{matrix} r_{11} & r_{12} & r_{13} & t_{x} \\ r_{21} & r_{22} & r_{23} & t_{y} \\ r_{31} & r_{32} & r_{33} & t_{z} \\ 0 & 0 & 0 & 1 \end{matrix} \right) = \left( \begin{matrix} R & \mathbf{t} \\ \mathbf{0}^{T} & 1 \end{matrix} \right) \tag{3} $$
由 (1 ~ 3), 可以得到
$$ \mathbf{r}_{\tilde{A}} = R\mathbf{r} + \mathbf{t} \tag{4} $$
(4)中$\tilde{A}$ 被称为仿射变换 (affine transformation) 。该操作描述为针对点 $\mathbf{r}$ 的线性变换($R\mathbf{r}$)加上一个平移操作($\mathbf{t}$),经过这一操作后的 $(\mathbf{r}_{\tilde{A}})$ 与操作前的点 $\mathbf{r}$ 相比,具有以下三个特征:
- 保留线性特征,如操作前在共线,操作后同样共线;
- 保留比例特征,如中点在操作后同样为中点;
- 保留平行特征;
变换细节
1. 平移
当 (3) 中 $R$ 为单位矩阵时,
$$ \tilde{A} = \left( \begin{matrix} 1 & 0 & 0 & t_{x} \\ 0 & 1 & 0 & t_{y} \\ 0 & 0 & 1 & t_{z} \\ 0 & 0 & 0 & 1 \\ \end{matrix} \right) \tag{5} $$
(4) 表示为,
$$ \begin{aligned} \tilde{\mathbf{r}_{A}} &= (r_x + t_x, r_y + t_y, r_z + t_z, 1)^{T} \\ \Rightarrow \mathbf{r}_{A} &= \mathbf{r} + \mathbf{t} \end{aligned}\tag{6} $$
需要注意的是, (6) 中 $\mathbf{r}_A$ 和 $\mathbf{r}$ 都是点,而 $\mathbf{t}$ 是一个向量。
矩阵 $R$ 只有一个重数(multiplicity)为 3 的特征值 (1)。次特征值相关的特征空间维数为 3 。
2. 放大
$$
R =
\left(
\begin{matrix}
s_x & 0 & 0\\
0 & s_y & 0\\
0 & 0 & s_z\\
\end{matrix}
\right) \tag{7}
$$
$$ \begin{cases} s_{x} = s_{y} = s_{z} && \text{isotropic} \\ \\ \text{otherwise} && \text{anisotropic} \end{cases} $$
变换后有,
$$ \tilde{\mathbf{r}}_{A} = (s_xr_x, s_yr_y, s_zr_z, 1)^{T} \tag{8} $$
$$ \begin{cases} s_{i} \gt 1 && \text{expanded} \\ \\ s_{i} \lt 1 && \text{contracted} \end{cases} $$
这种操作沿着基坐标 (X, Y, Z) 执行,可以通过正交矩阵(orthogonal matrix, O)将其沿着其他正交方向压缩。
$$ R = O\left( \begin{matrix} s_x & 0 & 0 \\ 0 & s_y & 0 \\ 0 & 0 & s_z \end{matrix} \right) O^{T} \tag{9} $$
注:当$OO^{T} = O^{T}O = I$ 时,方阵被称作正交。实际上,正交矩阵也是旋转矩阵的一种。
矩阵 $R$ 的特征值为 $s_x$ 、$s_y$ 和 $s_z$,重数均为 1。没种特征值对应特征空间维度为 1 。
3. 切变(Shearing)
剪切过程可以理解为用不同强度和不同方向压缩每个轴的结果,导致体积的变形。
假设通过压缩 X 轴在 Y 方向上的体积的方式来进行变形,相应的变换矩阵为,
$$ R_{sh_{1}} = \left( \begin{matrix} 1 & h_{xy} & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \\ \end{matrix} \right) \tag{10} $$
获得的新坐标为,
$$ \tilde{\mathbf{r}}_A = (r_x + h_{xy} r_y, r_y, r_z, 1)^{T} \tag{11} $$
$R_{sh_1}$ 特征值为 1, 重数为 3, 但特征空间仅跨越了维数为 2 的
$$ \left( \begin{matrix} 1 & 0 \\ 0 & 0 \\ 0 & 1 \\ \end{matrix} \right) \tag{12} $$
我们也可以通过下面矩阵来对矩阵 $X$ 在 $Z$ 方向上进行变形,
$$ R_{sh_{2}} = \left( \begin{matrix} 1 & h_{xy} & h_{xz} \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{matrix} \right) \tag{13} $$
这种情况下,特征值与重数不发生改变,但特征空间现在的维度只有 1,
$$ \left( \begin{matrix} 1 \\ 0 \\ 0 \\ \end{matrix} \right) \tag{14} $$
最终,我们可以沿着 $Z$ 方向再次对 $Y$ 进行变形,变形矩阵为
$$ R_{sh_{3}} = \left( \begin{matrix} 1 & h_{xy} & h_{xz} \\ 0 & 1 & h_{yz} \\ 0 & 0 & 1 \end{matrix} \right) \tag{15} $$
能够证明,任何剪切矩阵可以用 $R_{sh}$ 矩阵的函数以及合适的正交矩阵来进行表示。
$$ R = OR_{sh_i}O^{T} \tag{16} $$
4. 镜面
根据一个面进行镜面处理,通过简单的翻转一个坐标。如根据 $\mathrm{YZ}$ 平面进行翻转,
$$ R_{plane} = \left( \begin{matrix} -1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \\ \end{matrix} \right) \tag{17} $$
此时特征值为 -1(重数为 1,特征空间为 1 维) 和 1(重数为 2, 特征空间为 2 维)。
也可以根据一条线进行镜面处理。如根据 $\mathrm{Z}$ 轴进行镜面操作,
$$ R_{line} = \left( \begin{matrix} -1 & 0 & 0 \\ 0 & -1 & 0 \\ 0 & 0 & 1 \\ \end{matrix} \right) \tag{18} $$
根据点镜面操作则为,
$$ R_{line} = \left( \begin{matrix} -1 & 0 & 0 \\ 0 & -1 & 0 \\ 0 & 0 & -1 \\ \end{matrix} \right) \tag{19} $$
与之前变换相似,可以通过使用合适的正交矩阵遵从任意平面或线操作,
$$ R = OR_{i}O^{T} \tag{20} $$
5. 旋转
旋转矩阵能够帮助将重构出的体积与实验投影相关联,是非常重要的。如果矩阵属于 $SO(3)$(三次特殊正交群——例如,具有实系数且行列式为 1 的 $3\times3$ 正交矩阵集合)。
3DEM 中,围绕其中轴旋转执行左手旋转规则(正旋转为顺时针旋转):
$$ R_{X}(\alpha) = \left( \begin{matrix} 1 & 0 & 0 \\ 0 & \cos{\alpha} & \sin{\alpha} \\ 0 & -\sin{\alpha}& \cos{\alpha} \\ \end{matrix} \right) \tag{21} $$
$$ R_{Y}(\alpha) = \left( \begin{matrix} \cos{\alpha} & 0 & -\sin{\alpha} \\ 0 & 1 & 0 \\ \sin{\alpha} & 0 & \cos{\alpha} \\ \end{matrix} \right) \tag{22} $$
$$ R_{Z}{(\alpha)} = \left( \begin{matrix} \cos{\alpha} & \sin{\alpha} & 0 \\ -\sin{\alpha} & \cos{\alpha} & 0 \\ 0 & 0 & 1 \\ \end{matrix} \tag{23} \right) $$
旋转矩阵的特征值为 $e^{ia}$ , $e^{-ia}$ 和 1 。重数均为 1 且相关特征空间维度为 1 。
同样可以利用合适正交矩阵求解围绕任意轴的旋转矩阵,
$$ R = OR_{i}O^{T} \tag{24} $$
然而实际上,对于任意旋转的更紧凑的方法————欧拉角(Euler angles)或四元数(quaternions)和视图向量(view vectors)。
旋转矩阵推导(附)
对于一个直角坐标系,可以使用极坐标表示,例如,
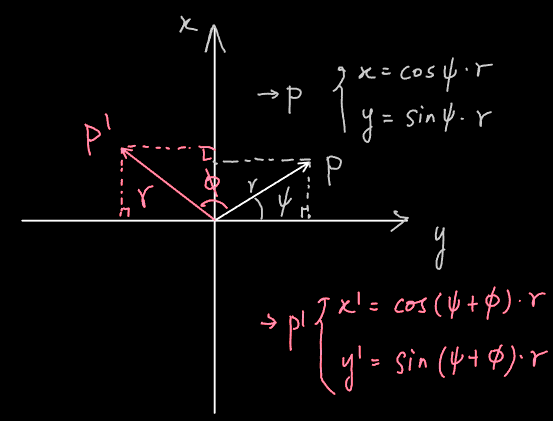
$$ \begin{cases} x = \cos{\psi}\cdot r \\ \\ y = \sin{\psi}\cdot r \\ \end{cases} \tag{S1} $$
其中 $r$ 为极坐标旋转半径。
对于经过旋转处理后的坐标,
$$ \begin{cases} x’ = \cos{(\psi + \phi)}\cdot r \\ \\ y’ = \sin{(\psi + \phi)}\cdot r \\ \end{cases} \tag{S2} $$
将 (S2) 中三角函数展开有,
$$ \begin{cases} x’ = (\cos{\psi}\cos{\phi} - \sin{\psi}\sin{\phi}) \cdot r \\ \\ y’ = (\sin{\psi}\cos{\phi} + \sin{\phi}\cos{\psi})\cdot r \\ \end{cases} \tag{S2} $$
将 (S1) 带入 (S1) 可得,
$$ \begin{cases} x’ = \cos{\phi}\cdot x -\sin{\phi}\cdot y \\ \\ y’ = \sin{\phi}\cdot x + \cos{\phi}\cdot y \\ \end{cases} \tag{S3} $$
6. 欧拉角
欧拉角是3DEM中表示旋转的最常用的表示方法。描述为,首先围绕给定坐标轴进行第一次旋转,这样就形成一组新的旋转坐标系,后围绕其中一个变换轴进行第二次旋转,最后围绕两次变换轴进行第三次旋转。在数学上,表示为
$$ R =R_3R_2R_1 \tag{25} $$
如图所示,
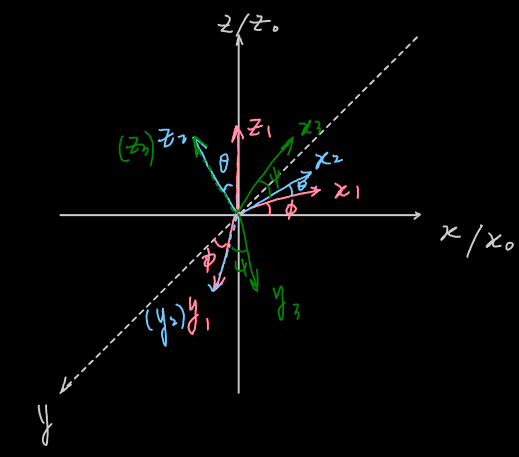
这是一种非常紧凑的表示方式,因为只有 3 个数字(三个欧拉角),就可以表示完整的旋转矩阵( $3\times3$ )。3DEM 中最广泛使用的惯例为 $ZYZ$ :第一次旋转围绕 $Z$ 轴(被称为旋转角,rotational angle,$\phi$ ),第二次旋转围绕 $Y$ 轴(成为方位角,azimuthal angle,$\theta$ ),第三次正旋转围绕 $Z$ 轴( 称为平面内旋转,in-plane rotation,$\psi$ )。
按照欧拉角定义,将(23)、(24)带入(25),
得到,
$$ \left( \begin{matrix} \cos{\phi} & \sin{\phi} & 0 \\ \cos{\phi} & \cos{\phi} & 0 \\ 0 & 0 & 1 \end{matrix} \right) \cdot \left( \begin{matrix} \cos{\theta} & 0 & -\sin{\theta} \\ 0 & 1 & 0 \\ \sin{\theta} & 0 & \cos{\theta} \\ \end{matrix} \right) \cdot \left( \begin{matrix} \cos{\psi} & \sin{\psi} & 0 \\ \cos{\psi} & \cos{\psi} & 0 \\ 0 & 0 & 1 \\ \end{matrix} \right) $$
最终推导出相关的欧拉矩阵为,
$$ \begin{aligned} R & = R_Z(\psi)R_Y(\theta)R_Z(\phi) \\ & = \left[ \begin{matrix} \cos{\psi}\cos{\theta}\cos{\phi}-\sin{\psi}\sin{\phi} & \cos{\psi}\cos{\theta}\sin{\phi}+\sin{\psi}\cos{\theta} & -\cos{\psi}\sin{\theta} \\ -\sin{\psi}\cos{\theta}\cos{\phi} - \cos{\psi}\sin{\theta} & -\sin{\psi}\cos{\theta}\sin{\theta} + \cos{\psi}\cos{\phi} & \sin{\psi}\sin{\theta} \\ \sin{\theta}\cos{\phi} & \sin{\theta}\sin{\phi} & \cos{\theta} \end{matrix} \right] \end{aligned}\tag{26} $$
在 Imagic 中,旋转矩阵为右手旋转定则(逆时针),所以使用角( $-\phi, \theta, -\psi$ )而 对于MRC,则需要使用角 ( $\phi,\theta,-\psi$ )。
给定旋转矩阵,可以通过以下计算来获得欧拉角,(S5) 中的每个元素用 r(row, col) 来表示,则明显可以得到,
$$ \begin{aligned} \lvert\sin{\theta}\rvert &= \sqrt{r_{13}^2 + r_{23}^2} \\ & = \sqrt{\sin^2{\theta}(\cos^2{\theta + \sin^2{\theta}})} \end{aligned} \tag{27} $$
这里考虑一些,欧拉角是否为 0 或 $\pi$ 的临界情况,
首先如果 $\lvert\sin{\theta}\rvert > 0$ ,
$$ \theta = atan2(r_{32}, r_{31}) = \arctan{\left(\frac{\sin{\theta}\sin{\phi}}{\sin{\theta}\cos{\phi}}\right)} \\ \psi = atan2(r_{23}, -r_{13}) = \arctan{\left(\frac{\sin{\psi}\sin{\theta}}{\cos{\psi}\sin{\theta}}\right)}\tag{28} $$
这里通过 $\psi$ 的值来推算 $\sin{\theta}$ 的符号 $s$ ,
$$ \begin{cases} \sin{\psi} = 0 && s=\mathrm{sign}\left(\frac{-r_{13}}{\cos{\psi}}\right) = \mathrm{sign}(-\sin{\theta}) \\ \\ \sin{\psi}\neq 0 && s=\mathrm{sign}\left(\frac{r_{23}}{\sin(\psi)}\right) = \mathrm{sign}(\sin{\theta}) \end{cases} \tag{29} $$
最终求出 $\theta$ 的值为,
$$ \theta = atan2(s\lvert\sin{\theta}\rvert, r_{33})\tag{30} $$
同理,当 $\theta = 0$ 时,
$$ \begin{cases} \mathrm{sign}(r_{33}) = \cos{\theta}>0 && \theta=0, \psi=atan2(r_{21}, -r_{11}) \\ \\ \mathrm{sign}(r_{33})<0 && \theta=\pi, \psi=atan2(r_{21}, -r_{11}) \end{cases} \tag{31} $$
不同软件对于欧拉角计算存在差异,如 EMAN 使用 $ZXZ$ ,但可以通过算法进行转换。在 EMAN 中使用 $\phi$,方位角(azimuth, az),以及高度(altitude, alt),
$$ R_{EMAN} = R_Z{\phi_{EMAN}}R_X(alt)R_Z(az) \tag{32} $$
两个系统中的转换关系如下:
$$ az = \phi + \frac{\pi}{2} $$ $$ alt = \phi $$ $$ \phi_{EMAN} = \psi - \frac{\pi}{2} \tag{33} $$
欧拉角的非唯一性
由于欧拉角分解遵循一定的协议,如 $ZYZ$ 会存在非唯一性,第二个非唯一性来源于
$$ R(\phi, \theta, \psi) = R(\phi+\pi, -\theta, \psi-\pi)\tag{34} $$
表征两个完全不同的欧拉角变换( $ZYZ$ )可能会表示相同的旋转。
第三个非唯一性来源于围绕相同轴旋转两次,称为万向节锁问题(gimbal lock problem)。让我们假设 $\theta =0$ 有
$$ \begin{aligned} R(\phi, \theta, \psi) &= R_Z(\psi)R_Y(0)RZ(\phi) \\ & = R_Z(\psi+\phi) \end{aligned}\tag{35} $$
这样的话,对于任意 $\alpha$ 值,都有
$$ R(\phi, 0, \psi)=R(\phi+\alpha, 0, \psi-\alpha)\tag{36} $$
所以在判断两个投影之间是否相近(投影方向只与 $\phi$, $\theta$ 有关),不能仅仅从欧拉角判断,还需要检查投影方向( $R$ 矩阵第三行)是否接近。
7. 四元数和视图向量(Quaternions and View Vectors)
四元数作为复数的补充,其虚部为 3D 向量。写作
$$ q = a + bi + cj + dk\tag{37} $$
其中,$a$ 为实部,$b$、$c$、$d$ 为虚部,而 $i$、$j$、$k$ 相当于虚数 $i$ 。也可以将四元数写作一个四维向量,
$$ q =(a, b, c, d)\tag{38} $$
或者表示为数字和 3D 向量的和,
$$ q = a + (b, c, d)\tag{39} $$
加法与复数相似,表示为
$$ (a, b, c, d) + (a’, b’, c’, d’) = (a+a’, b+b’, c+c’, d+d’)\tag{40} $$
乘法更为复杂,参考复数的乘法,表示为
$$ \begin{aligned} (a\cdot1+b\cdot i)\cdot(a’\cdot1+b’\cdot i)&=aa’(1\cdot1)+ba’(i\cdot1)+ab’(1\cdot i)+bb’(i\cdot i) \\ &=(aa’-bb’)\cdot1+(ba’+ab’)\cdot i \end{aligned}\tag{41} $$
虚数乘积遵循以下关系,
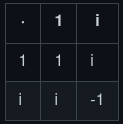
但对于四元数则更加复杂,遵循以下规则
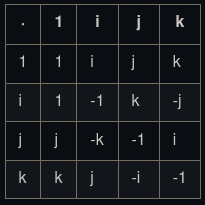
四元数可以在 Bsoft 旋转的内部表示中使用。围绕给定 3D 轴 $\mathbf{u}$ 旋转可以用四元数表示为,
$$ q_{\mathbf{u},\alpha}=\cos{(\frac{\alpha}{2})} + \sin{(\frac{\alpha}{2})}\frac{\mathbf{u}}{\lvert\lvert \mathbf{u}\rvert\rvert} \tag{42} $$
如果将 $q_{\mathbf{u}, \alpha}$ 改写为 $q_{\mathbf{u}, \alpha} = a + (b, c, d)$ 的形式,可以推导出旋转矩阵为,
$$ R = \left( \begin{matrix} a^2 + b^2 - c^2 - d^2 & 2bc-ad & 2bd+2ac \\ 2bc+2ad & a^2 - b^2 + c^2 - d^2 & 2cd - 2ab \\ 2bd-2ac & 2cd + 2ab & a^2 - b^2 - c^2 + d^2 \end{matrix} \right)\tag{43} $$
该旋转矩阵可以按照公式 (2) 中相似的操作去进行旋转计算。对于每个旋转矩阵,存在唯一的范数为 1 的四元数 (单位四元数,unitary quaternion)。
可以通过求解下面的等式来从旋转矩阵对角线中恢复四元数,
$$ \left( \begin{matrix} 1 & 1 & -1 & -1 \\ 1 & -1 & 1 & -1 \\ 1 & -1 & -1 & 1 \\ 1 & 1 & 1 & 1 \end{matrix} \right) {} \left( \begin{matrix} a^2 \\ b^2 \\ c^2 \\ d^2 \\ \end{matrix} \right)= \left( \begin{matrix} r_{11} \\ r_{22} \\ r_{33} \\ 1 \end{matrix} \right) \tag{44} $$
其中最后一个等式强迫四元数范数为 1 。可以通过下面的等式求出四元数组分的符号,
$$ \begin{aligned} \mathrm{sign}(a) &= 1; \\ \mathrm{sign}(b) &= \mathrm{sign}(r_{32} - r_{23}); \\ \mathrm{sign}(c) &= \mathrm{sign}(r_{13} - r_{31}); \\ \mathrm{sign}(d) &= \mathrm{sign}(r_{21} - r_{12}); \end{aligned} \tag{45} $$
四元数在这种情况下的唯一性是很重要的特性,因为可以通过对于他们相关表示的简单对比来比较两个几何上的情况。
除了四元数,视图向量也可用于表示旋转。其通过旋转轴 $(x, y, z)$ 以及围绕该轴的角度 $\alpha$ 来表示一个旋转过程。有下面两个有点,
- 用四元数表示更加显而易见;
- 能提供如果从视图向量转换为欧拉 $ZYZ$ 角的转换公式。
用下面参数进行计算与表示,
$$ \begin{aligned} x &= \cos{\phi}\sin{\theta} \\ y &= \sin{\phi}\sin{\theta} \\ z &= \cos{\theta} \\ \alpha &= \phi + \psi \end{aligned} \tag{46} $$
以上参数来自于公式 (26) 的第三行,并可以根据以上的视图向量可以获得欧拉角,
$$ \begin{cases} x = y = 0 && \phi = \theta = 0; \\ \\ \text{else} && \phi = \arctan{(\frac{y}{x})}, \theta = \arctan{(z)}; \end{cases} \tag{47} $$
后由 $\psi = \alpha - \theta$ 计算 $\psi$ 的值。
8. 仿射变换:几个变换的组合
对于有限次数 $N$ 次连锁操作,包括之前所总结的平移、放大、缩小、切变、镜像以及旋转等等,如以下,
$$ \begin{aligned} \tilde{\mathbf{r}{\tilde{A}{1}}} &= \tilde{A}{1}\tilde{\mathbf{r}} \\ \tilde{\mathbf{r}{\tilde{A}{2}}} &= \tilde{A}{2}\tilde{\mathbf{r}{\tilde{A}{1}}} \\ \cdots \\ \tilde{\mathbf{r}{\tilde{A}{N}}} &= \tilde{A}{N}\tilde{\mathbf{r}}{\tilde{A}_{N-1}} \\ \end{aligned} \tag{48} $$
以上可以结合为一个关系式,
$$ \tilde{A}{\tilde{A}{N}} = \left(\tilde{A}{N}\cdots\tilde{A}{2}\tilde{A}_{1}\right)\tilde{\mathbf{r}} \tag{49} $$
给定一个仿射变换 $\tilde{A}$ ,首先对其进行第一步分解为,
$$ \tilde{A} = \tilde{T}\tilde{A}’ = \left( \begin{matrix} I_3 & \mathbf{t} \\ \mathbf{0}^T & 1 \end{matrix} \right) \left( \begin{matrix} A_3 & \mathbf{0} \\ \mathbf{0}^T & 1 \end{matrix} \right) \tag{50} $$